メニュー
| ▼ アクセス(地図)
▼ Windowsアプリ開発 ▼ マイコン開発 ▼ CGI・PHP制作 |
▼ サイトマップ(全投稿記事)
▼ タイトル(画像一覧) ▼ 事業内容 |

お問い合わせメールフォームが開きます。
2011年10月05日
赤外線センサー by PIC16F1823

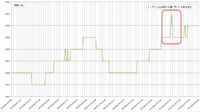
シャープの赤外線測距モジュールGP2Y0A21YKを使用してみました。
制御用のマイコンは 「PIC16F1823」 90円で売られていた14ピンマイコンです。
秋月電子で購入した赤外線測距モジュールの専用ケーブルは
白がVo オレンジがGND 黒がVccなので要注意です。
【参考資料】
 赤外線測距モジュールGP2Y0A21YKデータシートPIC16F1823データシート電圧-距離換算表 「PIC AVR 工作室」
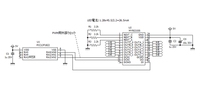
赤外線測距モジュールGP2Y0A21YKデータシートPIC16F1823データシート電圧-距離換算表 「PIC AVR 工作室」【配線】
1pin VDD
2pin RA5 LCD RS出力
3pin RA4(AN3) A/D入力
4pin MCLR
5pin RC5 x
6pin RC4 x
7pin RC3 LCDデータ(D7) 出力
8pin RC2 LCDデータ(D6) 出力
9pin RC1 LCDデータ(D5) 出力
10pin RC0 LCDデータ(D4) 出力
11pin RA2 LCD E 出力
12pin PGC
13pin PGD
14pin VSS
【ソースコード抜粋】
//───────────────────────────────────
// ポート初期設定
//───────────────────────────────────
void init_port(void)
{
PORTA = 0x00;
TRISA = 0b00010000; // 1:入力、0:出力設定
ANSELA = 0b00010000; // RA4:A/D入力
PORTC = 0x00;
TRISC = 0b00100000; // 1:入力、0:出力設定
ADCON0 = 0b00001100; // AN3指定
ADFM = 1; // A/D Result Format Right justified
ADON = 1; // A/D On
}
//───────────────────────────────────
// A/D変換 10bit結果取得
//───────────────────────────────────
unsigned int read_a2d( void )
{
unsigned int tmpData;
GODONE = 1; // initiate conversion on the selected channel
while(GO_nDONE)
{
continue;
}
tmpData = ADRESL;
tmpData |= (ADRESH<<8)&0x0300;
return(tmpData); // return 10bit result
}
//───────────────────────────────────
// 定数/型定義
//───────────────────────────────────
// 各距離での電圧値(10bit)
typedef enum
{
DISTANCE_80 = 78,
DISTANCE_70 = 88,
DISTANCE_60 = 101,
DISTANCE_50 = 121,
DISTANCE_40 = 148,
DISTANCE_30 = 183,
DISTANCE_20 = 263,
DISTANCE_15 = 332,
DISTANCE_10 = 469,
DISTANCE_05 = 641
} IR_DISTANCE;
// 各距離での傾き(cm/V)
typedef enum
{
TILT_80 = 218,
TILT_70 = 158,
TILT_60 = 103,
TILT_50 = 76,
TILT_40 = 58,
TILT_30 = 26,
TILT_20 = 15,
TILT_15 = 7,
TILT_10 = 6
} IR_TILT;
// 各距離での基準距離(cm)
typedef enum
{
BASE_80 = 164,
BASE_70 = 138,
BASE_60 = 111,
BASE_50 = 95,
BASE_40 = 82,
BASE_30 = 53,
BASE_20 = 39,
BASE_15 = 27,
BASE_10 = 24
} IR_BASE;
//───────────────────────────────────
const IR_DISTANCE DISTANCE[]={
DISTANCE_80,DISTANCE_70,DISTANCE_60,DISTANCE_50,DISTANCE_40,
DISTANCE_30,DISTANCE_20,DISTANCE_15,DISTANCE_10,DISTANCE_05};
const IR_TILT TILT[]={
TILT_80,TILT_70,TILT_60,TILT_50,TILT_40,TILT_30,TILT_20,TILT_15,TILT_10};
const IR_BASE BASE[]={BASE_80,BASE_70,BASE_60,BASE_50,BASE_40,
BASE_30,BASE_20,BASE_15,BASE_10};
//───────────────────────────────────
// 距離計算 (cm)
//───────────────────────────────────
unsigned short read_distance( void )
{
unsigned short tmpAD;
unsigned short tmpData;
unsigned char i;
// A/D値取得
tmpAD = read_a2d();
if( tmpAD < DISTANCE[0] )
{
return( 0xffff ); // 80cm以上
}
else
{
for( i = 1; i < 10; i++ )
{
if( tmpAD < DISTANCE[i] )
{
tmpData = tmpAD * TILT[i-1];
tmpData /= 205; // 10bit/5V = 1024/5
tmpData = BASE[i-1] - tmpData;
return( tmpData ); // 計算値(cm)
}
}
}
return( 0x0000 ); // 範囲外
}