メニュー
| ▼ アクセス(地図)
▼ Windowsアプリ開発 ▼ マイコン開発 ▼ CGI・PHP制作 |
▼ サイトマップ(全投稿記事)
▼ タイトル(画像一覧) ▼ 事業内容 |

お問い合わせメールフォームへジャンプします。
2024年04月09日
RL78/G13 CS+プログラムロードでフリーズ
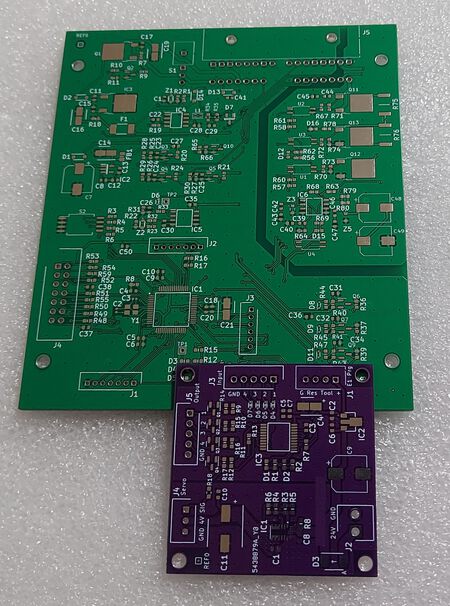
ルネサスマイコン RL78/G13 R5F100FA を使用した回路で
CS+でのプログラムロード時にフリーズするので対応策を探しました。
以前、同一マイコン(電源は5V)で問題なくプログラムロードできていましたが
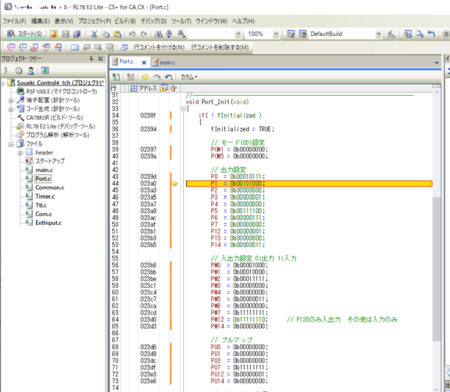
今回電源電圧を3.3Vに変更したのでそこに設定漏れがあったようです。
下記のサイトにヒントがありました。
「E1エミュレータとRL78/G13の接続と電源電圧」
https://community-ja.renesas.com/cafe_rene/forums-groups/mcu-mpu/rl78/f/forum18/1343/e1-rl78-g13
E1との接続

オプションバイト(000C1H)を、1AHに変更

電源電圧は3.3Vから5Vへの変更は大変なので、3.3VのままRenesas Flash Programmer でHEXファイルを書込み
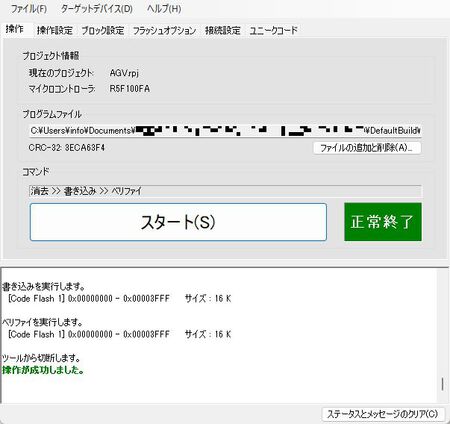
その後は、CS+でプログラムロード、デバッグが可能になりました。
CS+でのプログラムロード時にフリーズするので対応策を探しました。
以前、同一マイコン(電源は5V)で問題なくプログラムロードできていましたが
今回電源電圧を3.3Vに変更したのでそこに設定漏れがあったようです。
下記のサイトにヒントがありました。
「E1エミュレータとRL78/G13の接続と電源電圧」
https://community-ja.renesas.com/cafe_rene/forums-groups/mcu-mpu/rl78/f/forum18/1343/e1-rl78-g13
E1との接続

オプションバイト(000C1H)を、1AHに変更

電源電圧は3.3Vから5Vへの変更は大変なので、3.3VのままRenesas Flash Programmer でHEXファイルを書込み

その後は、CS+でプログラムロード、デバッグが可能になりました。
2023年08月30日
基板設計
2022年10月18日
E2エミュレータLiteの代替

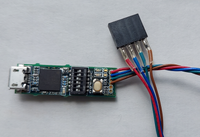
ルネサス社のマイコンRL78シリーズのデバッグ、書込みに使用する「E2エミュレータLite」の代替品としてE2OB(AE-RL78G11-STICK)が良さそうです。
現在、秋月電子さんにて、4320→2100円(在庫処分特価!)で販売中です。
https://akizukidenshi.com/catalog/g/gK-13752/
好評なのか値段が元の4320円にもどっていました。(2022/11/04)
AE-RL78G11-STICK(表) 購入時の状態

AE-RL78G11-STICK(裏) 購入時の状態

基板を分割し配線を出した後、熱収縮チューブを被せて完成です。

開発環境「CS+ for CCでE2Liteを指定してデバッグできます。

ルネサス社のマイコンRL78シリーズのデバッグ、書込みに使用する「E2エミュレータLite」の代替品としてE2OB(AE-RL78G11-STICK)が良さそうです。
現在、秋月電子さんにて、4320→2100円(在庫処分特価!)で販売中です。
https://akizukidenshi.com/catalog/g/gK-13752/
好評なのか値段が元の4320円にもどっていました。(2022/11/04)
AE-RL78G11-STICK(表) 購入時の状態

AE-RL78G11-STICK(裏) 購入時の状態

基板を分割し配線を出した後、熱収縮チューブを被せて完成です。

開発環境「CS+ for CCでE2Liteを指定してデバッグできます。

2022年01月17日
トンガ火山爆発による大気圧変動

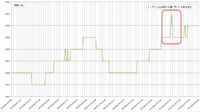
先日制作した「温湿度気圧センサ・BME280とArduino」を連続運用していたので
トンガ火山爆発による大気圧変動を浜松市内で2hPa程度捉えたようでした。

先日制作した「温湿度気圧センサ・BME280とArduino」を連続運用していたので
トンガ火山爆発による大気圧変動を浜松市内で2hPa程度捉えたようでした。
2021年08月27日
BME280+Arduino

温湿度監視のため、温湿度気圧センサ・BME280とArduinoを使用してみました。
ライブラリは下記よりダウンロード。
https://github.com/sparkfun/SparkFun_BME280_Arduino_Library
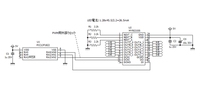
BME280 との通信は I2Cを使用、アドレス設定端子は3.3Vにプルアップして0x77としました。
J1,J2、J3はすべてショート。

I2CとArduinoの接続は念のため100Ωのシリーズ抵抗を入れました。
スケッチはライブラリの「Example2_I2CAddress.ino」を改造して1分おきにデータ表示。
// スケッチ本体
#include
#include "SparkFunBME280.h"
BME280 mySensorA; //Uses default I2C address 0x77
void setup()
{
Serial.begin(115200);
Serial.println("Example showing alternate I2C addresses");
Wire.begin();
mySensorA.setI2CAddress(0x77);
if(mySensorA.beginI2C() == false)
Serial.println("Sensor A connect failed");
}
void loop()
{
Serial.print("Temp:");
Serial.print(mySensorA.readTempC(), 1);
Serial.print("℃ ");
Serial.print("Humidity:");
Serial.print(mySensorA.readFloatHumidity(), 1);
Serial.print("% ");
Serial.print("Pressure:");
Serial.print(mySensorA.readFloatPressure()/100, 0);
Serial.print("hPa");
Serial.println();
delay(60000);
}
TeraTermでの表示

Arduino互換機でUSBシリアルにCH340を使用時、ドライバは下記よりダウンロードできます。(2021/08/27時点)
(メーカのWebサイトは?のようでした)
https://akizukidenshi.com/catalog/g/gI-13544/

温湿度監視のため、温湿度気圧センサ・BME280とArduinoを使用してみました。
ライブラリは下記よりダウンロード。
https://github.com/sparkfun/SparkFun_BME280_Arduino_Library
BME280 との通信は I2Cを使用、アドレス設定端子は3.3Vにプルアップして0x77としました。
J1,J2、J3はすべてショート。

I2CとArduinoの接続は念のため100Ωのシリーズ抵抗を入れました。
スケッチはライブラリの「Example2_I2CAddress.ino」を改造して1分おきにデータ表示。
// スケッチ本体
#include
#include "SparkFunBME280.h"
BME280 mySensorA; //Uses default I2C address 0x77
void setup()
{
Serial.begin(115200);
Serial.println("Example showing alternate I2C addresses");
Wire.begin();
mySensorA.setI2CAddress(0x77);
if(mySensorA.beginI2C() == false)
Serial.println("Sensor A connect failed");
}
void loop()
{
Serial.print("Temp:");
Serial.print(mySensorA.readTempC(), 1);
Serial.print("℃ ");
Serial.print("Humidity:");
Serial.print(mySensorA.readFloatHumidity(), 1);
Serial.print("% ");
Serial.print("Pressure:");
Serial.print(mySensorA.readFloatPressure()/100, 0);
Serial.print("hPa");
Serial.println();
delay(60000);
}
TeraTermでの表示

Arduino互換機でUSBシリアルにCH340を使用時、ドライバは下記よりダウンロードできます。(2021/08/27時点)
(メーカのWebサイトは?のようでした)
https://akizukidenshi.com/catalog/g/gI-13544/